Code
import numpy as np
import matplotlib.pyplot as pltThis section focuses on using using the SVD to find a linear subspace of lower dimension in which to project the data. The objective is to show that dimensionality reduction works well in linear subspaces when the underlying structure is linear but quickly shows limitation for non-linear structures.
We first apply the SVD to an affine functions. The physical space of the dataset is \(\mathbb{R}^2\) but the data set is in fact 1D. The SVD is used to find a suitable 1D linear subspace of \(\mathbb{R}^2\) in which the data can be projected without loosing any information.
We start by defining the function and by computing the SVD of all the 2D snapshots.
import numpy as np
import matplotlib.pyplot as pltn_sample = 100 # Choose number of samples
x = np.linspace(0,10,n_sample) # create vector x
# Affine parameters
a = 1.5 # Slope
b=0 # y-axis origin
# Affine function
y = a*x+b # Affine function
X = np.stack((x,y)) # Create numpy array
# Noise
n_coef = 1 # Noise magnitude
X += + n_coef*np.random.rand(*X.shape) # Noisy data
# SVD
U,S,V = np.linalg.svd(X) # SV DecompositionTo visualise the underlying space found in the data by the SVD, we plot the principal directions \(\nu_1\) and \(\nu_2\) onto the initial dataset.
colors_1D = plt.cm.viridis(np.linspace(0, 1, len(X[0,:]))) # Generate a color gradient
# plots
# Origin point
origin = np.array([[0, 0], [0, 0]])
U_scaled = -5*U
plt.figure(figsize=(6, 6))
# plt.quiver(*origin, U_scaled[:, 0], U_scaled[:, 1], angles='xy', scale_units='xy', scale=1, color=['r', 'b'])
plt.quiver(*origin, U_scaled[0, 0], U_scaled[0, 1], angles='xy', scale_units='xy', scale=1, color='#01426A', label=r'$\nu_1$')
plt.quiver(*origin, U_scaled[1, 0], U_scaled[1, 1], angles='xy', scale_units='xy', scale=1, color='#CE0037', label=r'$\nu_2$')
plt.legend()
plt.gca().set_aspect('equal')
plt.ylim(-4, 15)
plt.xlim(-4, 15)
plt.xlabel(r"$x$")
plt.ylabel(r"$y$")
# plt.plot(X[0,:],X[1,:],'+')
# plt.scatter(X[0,:],X[1,:], color=colors_1D, s=100)
plt.scatter(X[0,:],X[1,:], facecolors='none', edgecolors=colors_1D, s=100)
plt.title("Principal component base and data points")
plt.show()
plt.close()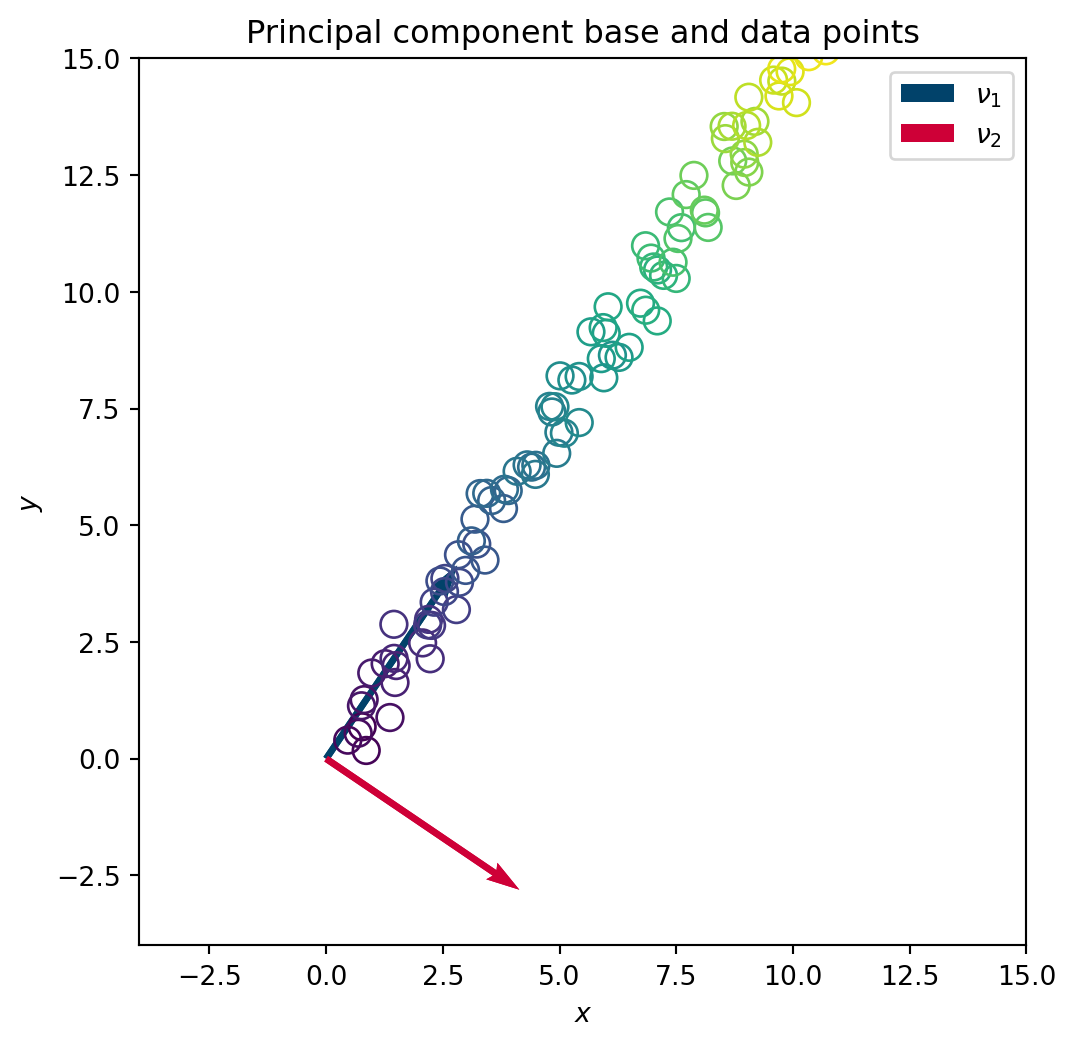
We then project the data onto the latent space \(\left(\nu_1,\nu_2\right)\).
# in the latent space
X_tilde = np.transpose(U)@X
# plt.plot(X_tilde[0,:],X_tilde[1,:],"-o")
plt.scatter(X_tilde[0,:],X_tilde[1,:], color=colors_1D, s=100)
plt.gca().set_aspect('equal', adjustable='box')
plt.xlabel(r"$\nu_1$")
plt.ylabel(r"$\nu_2$")
plt.show()
plt.close()
We can see that the initial 2D data in fact lies in a 1D space and that the first principal direction \(\nu_1\) is sufficient to describe the full data set.
To show the limitation of the SVD to find non-linear manifold, a sin function is now studied in a similar manner.
Again, we start by defining the function and by computing the SVD of all the 2D snapshots.
# In 1D for an sin function
n_sample = 100 # Choose number of samples
# x = np.linspace(0,np.pi/4,n_sample)
x = np.linspace(0,6,n_sample) # create vector x
# Affine parameters
a = 1.5 # Slope
b=0 # y-axis origin
# Affine function
y = np.sin(x) # Sin function
X = np.stack((x,y)) # Create numpy array
# Noise
n_coef = 0.1 # Noise magnitude
X += + n_coef*np.random.rand(*X.shape) # Noisy data
# SVD
U,S,V = np.linalg.svd(X) # SV DecompositionIn a similar manner, we plot the principal directions \(\nu_1\) and \(\nu_2\) onto the data set
# plots
# Origin point
origin = np.array([[0, 0], [0, 0]])
U_scaled = -5*U
plt.figure(figsize=(6, 6))
# plt.quiver(*origin, U_scaled[:, 0], U_scaled[:, 1], angles='xy', scale_units='xy', scale=1, color=['r', 'b'])
plt.quiver(*origin, U_scaled[0, 0], U_scaled[0, 1], angles='xy', scale_units='xy', scale=1, color='#01426A', label=r'$\nu_1$')
plt.quiver(*origin, U_scaled[1, 0], U_scaled[1, 1], angles='xy', scale_units='xy', scale=1, color='#CE0037', label=r'$\nu_2$')
plt.legend()
plt.gca().set_aspect('equal')
# plt.ylim(-4, 15)
# plt.xlim(-4, 15)
plt.xlabel(r"$x$")
plt.ylabel(r"$y$")
# plt.plot(X[0,:],X[1,:],'+')
plt.scatter(X[0,:],X[1,:], facecolors='none', edgecolors=colors_1D, s=100)
plt.title("Principal component base and data points - sin")
plt.show()
plt.close()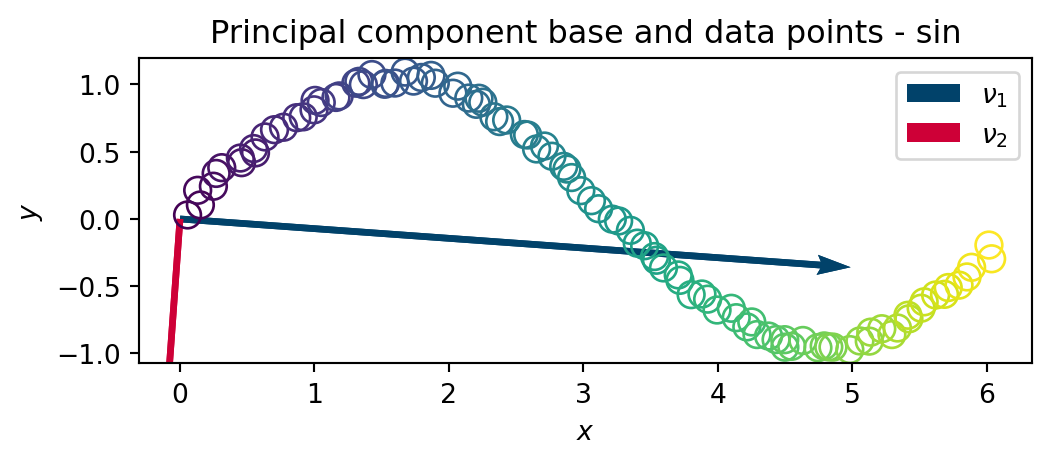
And we project the data onto the latent space \(\left(\nu_1,\nu_2\right)\).
# in the latent space
X_tilde = np.transpose(U)@X
# plt.plot(X_tilde[0,:],X_tilde[1,:],"-o")
plt.scatter(X_tilde[0,:],X_tilde[1,:], color=colors_1D, s=100)
plt.gca().set_aspect('equal', adjustable='box')
plt.xlabel(r"$\nu_1$")
plt.ylabel(r"$\nu_2$")
plt.show()
plt.close()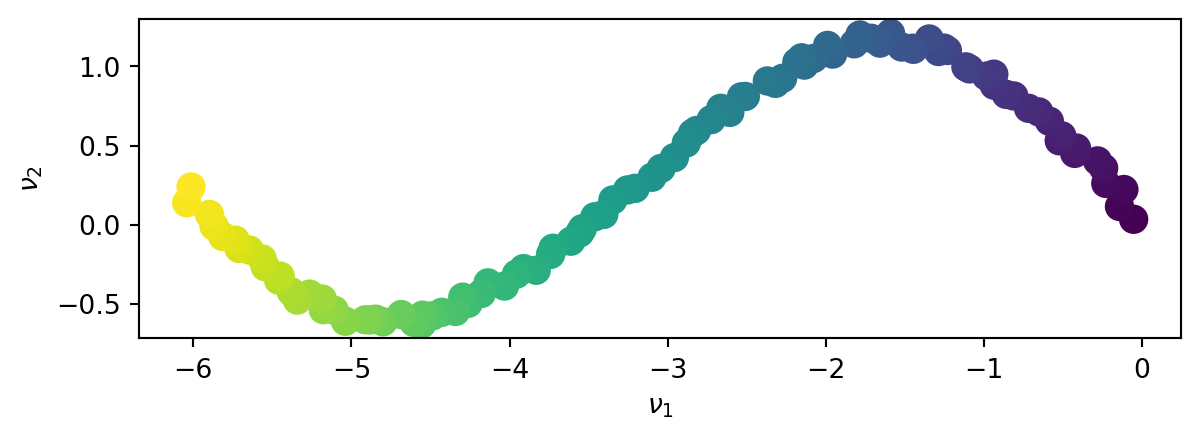
This time, the SVD does not exhibit a lower dimension space in which the data can be represented. Both principal directions are required to represent the non-linear data set.
This section focuses on using using the kPCA to find a non-linear manifold of lower dimension in which to project the data. The objective is to show that dimensionality reduction works well in non-linear cases where the SVD failed.
We first apply the SVD to a sin function. The physical space of the dataset is \(\mathbb{R}3\) but the data set is in fact 2D. The kPCA is used to find a suitable 2D (non-linear) manifold in which the data can be projected without loosing any information.
x = np.linspace(0,4*np.pi,1500)
y = np.sin(x) # Sin function
n_coef = 0 # Noise level
z = np.random.randn(*x.shape)
X = np.stack((x,y,z)) # Create 3D dataset
X += + n_coef*np.random.rand(*X.shape) # Add noiseNote: The PCA conventions are transposed compared to SVD’s conventions
Y = np.transpose(X)We define the kPCA paramerets, namely
n_components = 2 # Number of component of the kpca
sigma =100 # sigma for Gaussian kernelWe now compute the kernel matrix based on the distance matrix using a Gaussian kernel
\[K(x_i, x_j) = \exp\left(-\frac{\|x_i - x_j\|^2}{2\sigma^2}\right)\]
d_2 = np.sum(Y**2, axis=1).reshape(-1, 1) + np.sum(Y**2, axis=1) - 2 * np.dot(Y, Y.T)
K = np.exp(-d_2 / (2 * sigma**2))We then center the kernel matrix as the PCA expects 0-mean data
\[ K_{\text{centered}} = K - \frac{1}{n} \mathbf{1} K - \frac{1}{n} K \mathbf{1} + \frac{1}{n^2} \mathbf{1} K \mathbf{1} \]
n = K.shape[0]
one_n = np.ones((n, n)) / n
K_centered = K - one_n @ K - K @ one_n + one_n @ K @ one_nWe perform an SVD of the centered kernel to find the principal directions of the high dimensional space,
U, S, V = np.linalg.svd(K_centered)that we then truncates. we then project the initial dataset onto the principal directions in the latent space
U_k = U[:, :n_components] # first eigenvectors
S_k = np.diag(S[:n_components]) # first singular values
# Project the centered kernel matrix onto the first eigenvectors
Y_kpca = U_k @ S_k In the physical space (the plot is interactive, feel free to explore the 3D dataset !)
colors = plt.cm.viridis(np.linspace(0, 1, len(X[0,:]))) # Generate a color gradient
import plotly.graph_objects as go
# colors_plotly = colors[:, :3]
colors_plotly = np.linspace(0, 1, X.shape[1])
x_points = X[0, :]
y_points = X[1, :]
z_points = X[2, :]
# Create the 3D scatter plot
fig = go.Figure(data=[go.Scatter3d(
x=x_points,
y=y_points,
z=z_points,
mode='markers',
marker=dict(
size=5, # Size of the markers
color=colors_plotly, # Color of the markers
colorscale='viridis', # Color scale
showscale=True, # Show color scale
)
)])
fig.update_layout(
scene=dict(
xaxis_title='x',
yaxis_title='y',
zaxis_title='z',
),
title='Physical Space'
)
fig.show()In the latent space
plt.scatter(Y_kpca[:,0], Y_kpca[:,1], color=colors, s=100) # s=100 for larger points
plt.xlabel(r"$\nu_1$")
plt.ylabel(r"$\nu_2$")
plt.title('latent space')
plt.gca().set_aspect('equal', adjustable='box')
plt.show()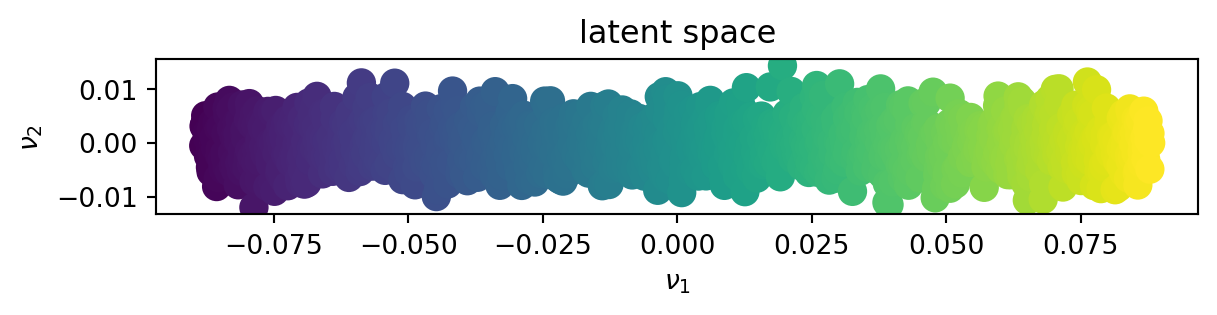
We can see that contrary to the SVD, the kPCA could decrease the dimensionnality of the supposidly 3D space into a 2D space, finding the underlying non-linear manifold onto which the dataset lies.
We now apply the SVD to an affine function. The physical space of the dataset is still \(\mathbb{R}3\) but the data set is in fact 2D. The kPCA is used to find a suitable 2D linear subspace similarly to what the SVD would give.
x = np.linspace(0,4*np.pi,1500)
# Affine parameters
a = 1.5 # Slope
b=0 # y-axis origin
# Affine function
y = a*x+b
n_coef = 1 # Noise level
z = np.random.randn(*x.shape)
X = np.stack((x,y,z)) # Create 3D dataset
X += + n_coef*np.random.rand(*X.shape) # Add noiseNote: The PCA conventions are transposed compared to SVD’s conventions
Y = np.transpose(X)We define the kPCA paramerets, namely
n_components = 2 # Number of component of the kpca
sigma =100 # sigma for Gaussian kernelWe now compute the kernel matrix based on the distance matrix using a Gaussian kernel
\[K(x_i, x_j) = \exp\left(-\frac{\|x_i - x_j\|^2}{2\sigma^2}\right)\]
d_2 = np.sum(Y**2, axis=1).reshape(-1, 1) + np.sum(Y**2, axis=1) - 2 * np.dot(Y, Y.T)
K = np.exp(-d_2 / (2 * sigma**2))We then center the kernel matrix as the PCA expects 0-mean data
\[ K_{\text{centered}} = K - \frac{1}{n} \mathbf{1} K - \frac{1}{n} K \mathbf{1} + \frac{1}{n^2} \mathbf{1} K \mathbf{1} \]
n = K.shape[0]
one_n = np.ones((n, n)) / n
K_centered = K - one_n @ K - K @ one_n + one_n @ K @ one_nWe perform an SVD of the centered kernel to find the principal directions of the high dimensional space,
U, S, V = np.linalg.svd(K_centered)that we then truncates. we then project the initial dataset onto the principal directions in the latent space
U_k = U[:, :n_components] # first eigenvectors
S_k = np.diag(S[:n_components]) # first singular values
# Project the centered kernel matrix onto the first eigenvectors
Y_kpca = U_k @ S_k In the physical space (the plot is interactive, feel free to explore the 3D dataset !)
colors = plt.cm.viridis(np.linspace(0, 1, len(X[0,:]))) # Generate a color gradient
import plotly.graph_objects as go
# colors_plotly = colors[:, :3]
colors_plotly = np.linspace(0, 1, X.shape[1])
x_points = X[0, :]
y_points = X[1, :]
z_points = X[2, :]
# Create the 3D scatter plot
fig = go.Figure(data=[go.Scatter3d(
x=x_points,
y=y_points,
z=z_points,
mode='markers',
marker=dict(
size=5, # Size of the markers
color=colors_plotly, # Color of the markers
colorscale='viridis', # Color scale
showscale=True, # Show color scale
)
)])
fig.update_layout(
scene=dict(
xaxis_title='x',
yaxis_title='y',
zaxis_title='z',
),
title='Physical Space'
)
fig.show()In the latent space
plt.scatter(Y_kpca[:,0], Y_kpca[:,1], color=colors, s=100) # s=100 for larger points
plt.xlabel(r"$\nu_1$")
plt.ylabel(r"$\nu_2$")
plt.title('latent space')
plt.gca().set_aspect('equal', adjustable='box')
plt.show()
We can see that for linear data, the kPCA behaves similarly to the SVD.